Mobile robots are nowadays frequently used for interaction tasks in the real world, e.g. for opening doors or for pick-and-place tasks. When used in real-world environments, adapting the robot controllers to uncertain contact dynamics is a significant challenge. Adaptive Model Predictive Control (AMPC) is an approach for controlling robot motions while adapting to uncertain or changing dynamics. However, most of the existing AMPC approaches used in mobile manipulation require either expert tuning or extensive training, making it very difficult to introduce novel or diverse tasks. In addition, the adjustment of several, independent environment parameters is usually not considered in the AMPC formulation. In this work, we introduce a hierarchical approach that uses Gaussian Mixture Models (GMMs) and Gaussian Mixture Regression (GMR) to predict the dynamic model parameters of MPC based on proprioceptive measurements and perform tasks with multiple unknown environmental parameters. The approach is evaluated in simulation and in real experiments on a mobile manipulator and compared to several baseline methods. It is shown that it outperforms standard MPC and an existing AMPC approach on several tasks such as carrying, pushing, and door opening.
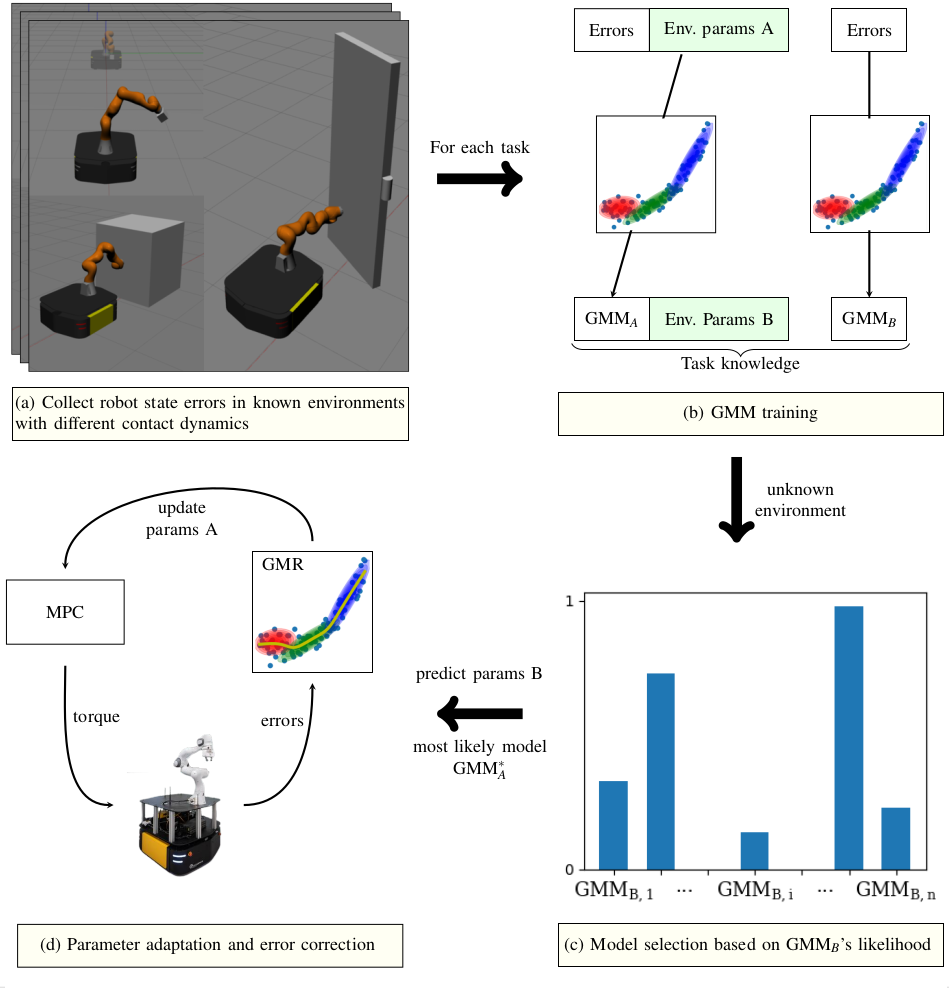
Since many robotic tasks can be described by a combination of simple carrying, pushing, and pulling tasks, a Spring-Mass-Damper (SMD) system is used to model the contact forces exerted by the robot on the environment. The parameters of the SMD system are adjusted online while an unknown task is executed. To achieve this, we collect a dataset of state errors from known environments with different contact dynamics. Then, we model the joint probability distribution of the dynamic parameters and the state error measurements as multivariate Gaussian Mixture Models (GMMs), one for each executed task. For prediction, we use a hierarchical approach. First, the most likely GMMs for the current task are selected by comparing their log-likelihoods using state error measurements as input. Then, the computed probabilities are used to predict the environmental damping and stiffness by weighted averages. Second, the most likely model is used to predict the remaining dynamic model parameters online, i.e., spring mass, inertia, and static force.
In the following video, the results from three experiments are presented. First, the generality of the proposed method is compared to baseline methods by evaluating the performance on executing unseen, unrelated tasks with increasing complexity (see Fig. 1.a). Second, we focus on similar tasks where the environment parameters are very difficult to distinguish because of overlapping effects, such as pushing objects over different floors and opening doors with friction. Thirdly, our method is applied on the real system to show its feasibility for carrying and pulling tasks.
Copyright on the material in this webpage has been transferred to IEEE for ICRA 2024: D. Rakovitis and D. Mronga, “Gaussian Mixture Likelihood-based Adaptive MPC for Interactive Mobile Manipulators”, 2024 IEEE International Conference on Robotics and Automation, Yokohama, Japan, 2024